Liftmechanisme.
Om ervoor te zorgen dat de grijper het bekertje recht omhoog en omlaag kan bewegen hebben wij gebruik gemaakt van een parallellogram als lift mechanisme. Dit omdat de parallellogram een eenparige cirkelbeweging omhoog en omlaag kan maken. Op die manier zorgt de grijper ervoor dat het bekertje verticaal blijft, zodat de inhoud van het bekertje er volledig in kan blijven. Met behulp van een actuator wordt de parallellogram omhoog getrokken. De stand waarin de actuator is uitgeschoven zie je in figuur 1a. De stand waarin de actuator volledig is ingeschoven zie je in figuur 1b en 1c. De zijwaartse beweging wordt gerealiseerd door een simpele actuator op de wand, die de gehele installatie zijwaarts beweegt. Overigens zorgen de korte armen ervoor dat bekertje zeer stabiel blijft, bovendien zorgt ze voor een algeheel compact uiterlijk.
Het draaimechanisme is te zien in figuur 2. Zoals te zien is, legt het bekertje een grote horizontale afstand af. Het draai- en liftmechanisme wordt bij elkaar gehouden door een robuuste maar elegante houtconstructie.
Om ervoor te zorgen dat de grijper het bekertje recht omhoog en omlaag kan bewegen hebben wij gebruik gemaakt van een parallellogram als lift mechanisme. Dit omdat de parallellogram een eenparige cirkelbeweging omhoog en omlaag kan maken. Op die manier zorgt de grijper ervoor dat het bekertje verticaal blijft, zodat de inhoud van het bekertje er volledig in kan blijven. Met behulp van een actuator wordt de parallellogram omhoog getrokken. De stand waarin de actuator is uitgeschoven zie je in figuur 1a. De stand waarin de actuator volledig is ingeschoven zie je in figuur 1b en 1c. De zijwaartse beweging wordt gerealiseerd door een simpele actuator op de wand, die de gehele installatie zijwaarts beweegt. Overigens zorgen de korte armen ervoor dat bekertje zeer stabiel blijft, bovendien zorgt ze voor een algeheel compact uiterlijk.
Het draaimechanisme is te zien in figuur 2. Zoals te zien is, legt het bekertje een grote horizontale afstand af. Het draai- en liftmechanisme wordt bij elkaar gehouden door een robuuste maar elegante houtconstructie.
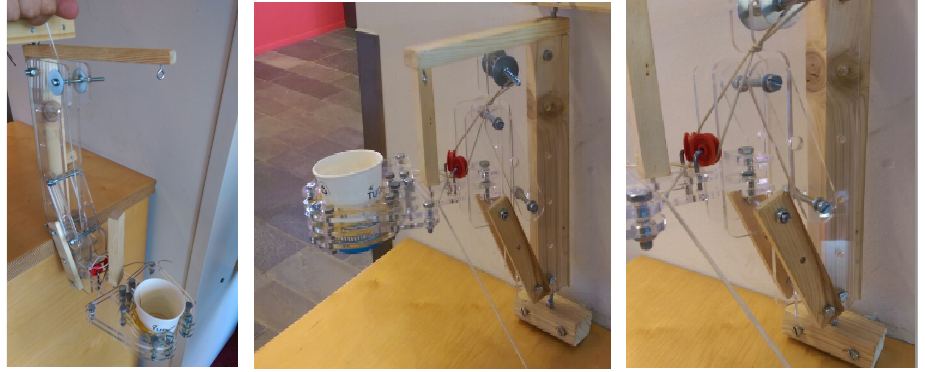
Figuur 1: a) de stand waarin de actuator in uiterste stand staat (actuator niet afgebeeld).
b) de stand waarin de actuator is ingetrokken
c) ingezoomd op de uiterste stand van het mechanisme.
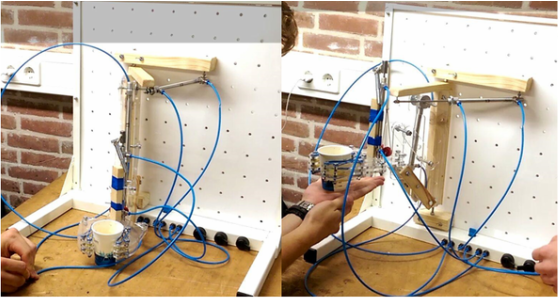
Figuur 2: a) Het draaimechanisme in ingetrokken stand b) Het draaimechanisme in uiterste stand
Bij het ontwerpen van de grijper kwamen wij er al snel achter dat als we het bekertje een opwaartse en een zijwaartse beweging wilde laten maken, wij een apart lift- en draaimechanisme nodig hadden.
Eén van de eerste eisen die wij stelden bij het liftmechanisme was dat het bekertje stabiel moest blijven (dus niet te veel wiebelde).Wij bedachten dat we dat het beste konden bereiken door de arm zo kort mogelijk te maken, zoals in figuur 2 te zien is. Na wat tekeningen gemaakt te hebben en de dimensies van de actuator bestudeerd te hebben stelden we vast dat wij armen van 10 centimeter wilden, om daarmee een opwaartse beweging van 18 centimeter te realiseren. Met simpele meetkunde konden wij alle afmetingen bepalen die nodig waren om alles te laten werken (zie figuur 3).
Eén van de eerste eisen die wij stelden bij het liftmechanisme was dat het bekertje stabiel moest blijven (dus niet te veel wiebelde).Wij bedachten dat we dat het beste konden bereiken door de arm zo kort mogelijk te maken, zoals in figuur 2 te zien is. Na wat tekeningen gemaakt te hebben en de dimensies van de actuator bestudeerd te hebben stelden we vast dat wij armen van 10 centimeter wilden, om daarmee een opwaartse beweging van 18 centimeter te realiseren. Met simpele meetkunde konden wij alle afmetingen bepalen die nodig waren om alles te laten werken (zie figuur 3).
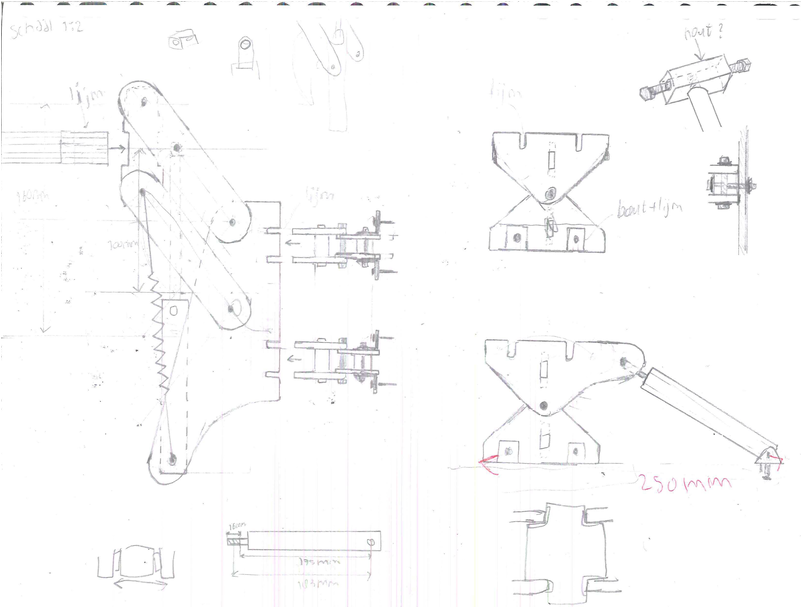
Figuur 3: Eerste concepttekeningen van het lift- en draaimechanisme. Hier werden later nog veel dingen aangepast.
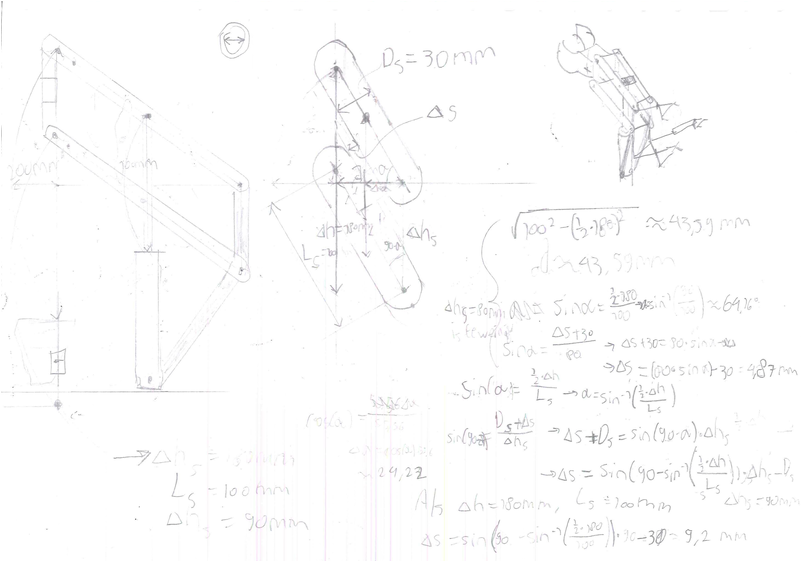
Figuur 4: Licht chaotische berekeningen
Ter bewijs dat de gekozen afmetingen werken, is figuur 5 een MATLAB-grafiek waarin het mmax is uitgezet tegenover d. Hierbij is mmax het maximale gewicht van de grijpmechanisme plus het bekertje/flesje/pakje, en geeft d de uitschuiving van de actuator aan.
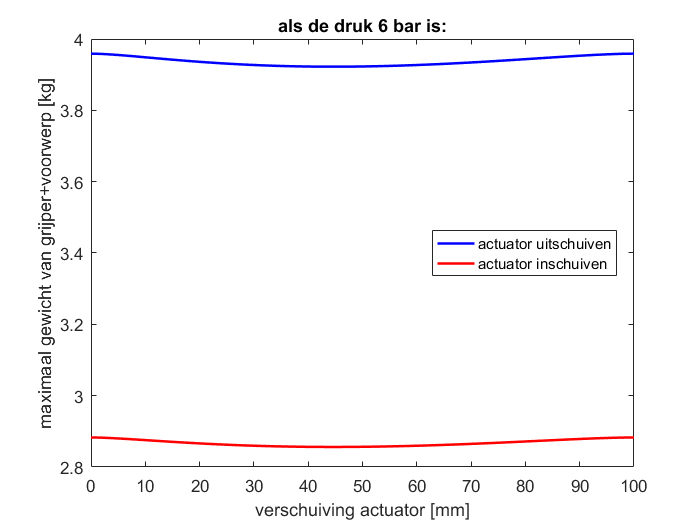
Het maximale gewicht van de grijper en het voorwerp mag bij een druk van 6 bar dus ongeveer 2.8 kg zijn, waar het natuurlijk ruim onderlicht. Het blijkt dat dit in de praktijk waar is, want het lift-en draaimechanisme deed het perfect en precies zoals gepland.
