Grijpermechanisme
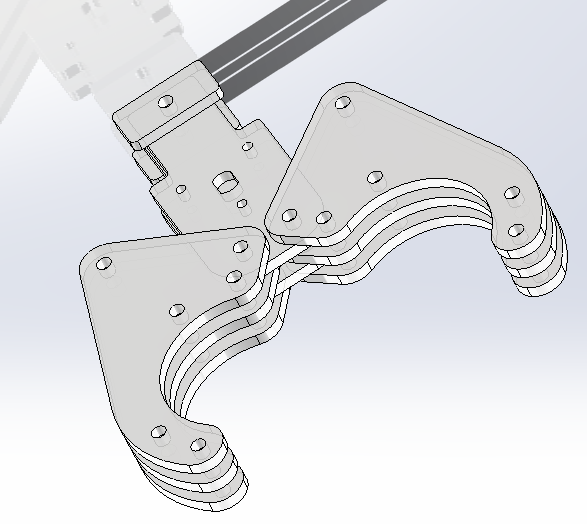
In het grijpmechanisme zijn een aantal slimme oplossingen geïntegreerd tot één goed werkend geheel. Met een oog voor detail is gezorgd dat alle onderdelen goed passen en een optimale vorm hebben. Hierbij heeft een 3D CAD model geholpen problemen en ontwerpfouten op te sporen.
In het grijpmechanisme zijn een aantal slimme oplossingen geïntegreerd tot één goed werkend geheel. Met een oog voor detail is gezorgd dat alle onderdelen goed passen en een optimale vorm hebben. Hierbij heeft een 3D CAD model geholpen problemen en ontwerpfouten op te sporen.
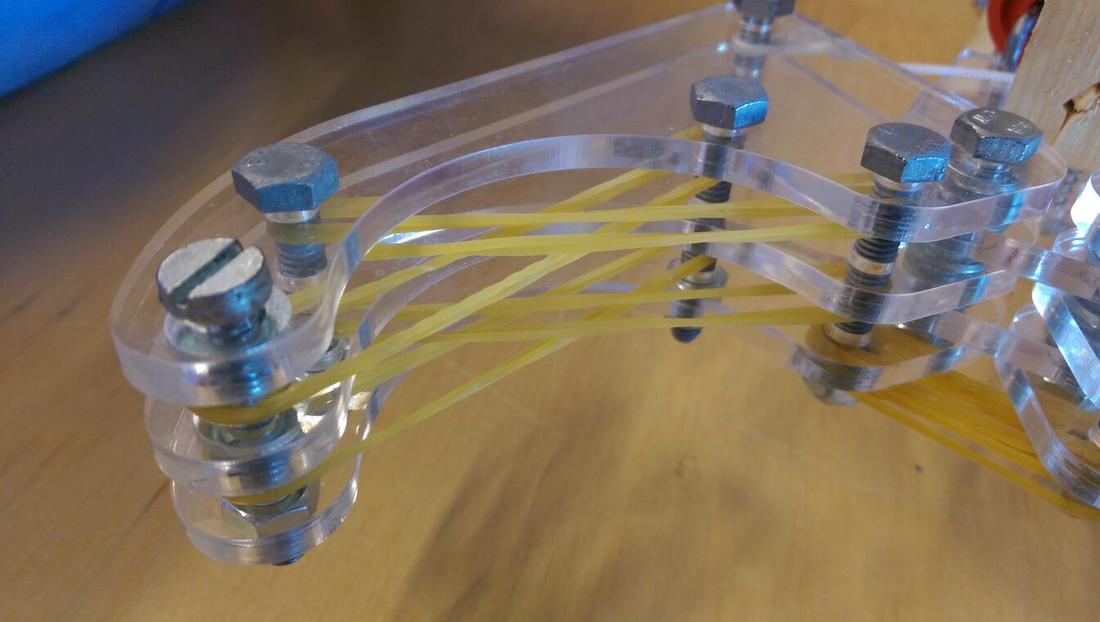
De grijper gebruikt op een inventieve manier elastieken waarmee de grijper gemakkelijk verschillende vormen kan oppakken. Het gebruik van twee vingers staat een grotere grijphoek toe.
De vingers van de grijper bestaan uit 3 lagen perspex, welke met een kleine tussenafstand op elkaar gebout zijn. Deze gelaagde manier van bouwen maakt het een sterk 3-dimensionaal geheel. De grip verkrijgt de grijper uit elastieken welke tussen bepaalde punten in de vinger gespannen worden. Dit geeft de mogelijkheid tot het stabiel vastklemmen van objecten met allerlei geometrieën en groottes, o.a. tetrapakken en koffiebekertjes. Op de scharnierpunten worden ringen gebruikt om wrijving te voorkomen.
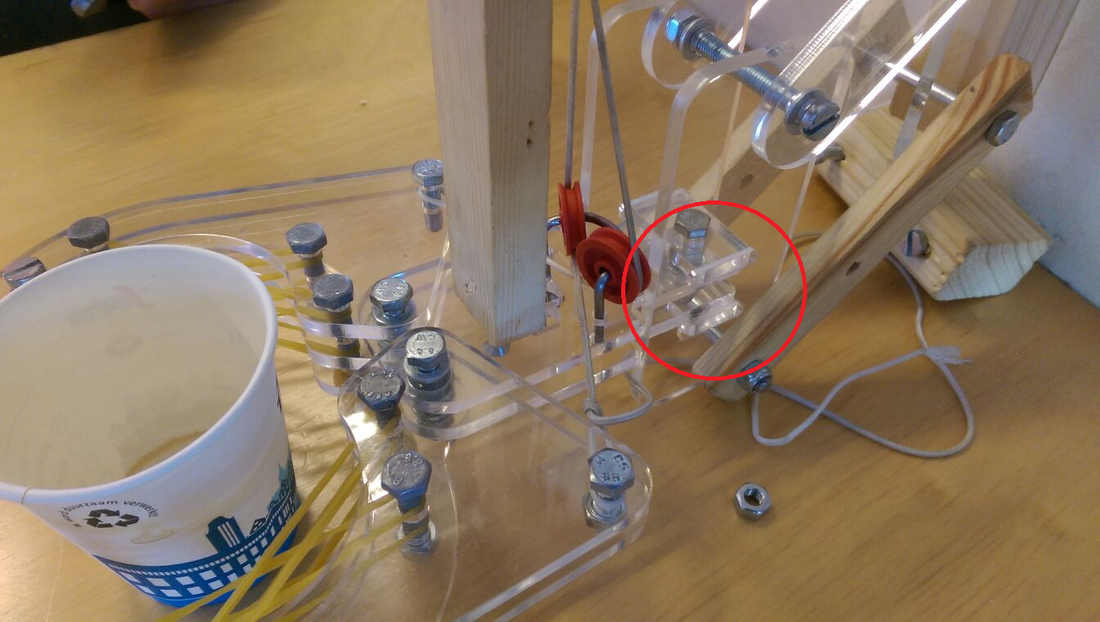
De grijper wordt via elastiek tussen de vingers dichtgehouden, waardoor hij naar keuze subtieler of juist harder kan knijpen. Door handig gebruik van draad en katrollen kon de actuator op een ruimtebesparende manier gepositioneerd worden.
De elastieken zorgen voor sluiting van de grijper; via touwtjes die aan hefbomen op de vingers verbonden zijn kan de grijper geopend worden. Door deze loskoppeling van de actuator-kracht en de grijpkracht, kan de grijpkracht afhankelijk van de toepassing worden harder of zachter worden ingesteld, zonder de pneumatische druk van het systeem te veranderen. Door de touwtjes via katrollen naar boven te leiden, is het mogelijk gemaakt de actuator verticaal te plaatsen, waardoor het ontwerp erg compact is.
De grijper en het verplaatsingsmechanisme komen via nok-gat verbindingen samen bij de verbindingsplaten.
Via inklemming door reeds bestaande bouten tussen de verbindingsplaten en via verlijming worden de verbindingen samengehouden. Dit zorgt voor een ijzersterke band op een plek waar dit, vanwege het grote moment wat daar uitgeoefend wordt, ook echt nodig is.
Door bewegingen in 3D te testen, konden ontwerpfouten worden voorkomen
De 3D-animaties gaven een goed beeld van de ruimte waarin bijv. de actuator moest kunnen bewegen. Uitstekende onderdelen konden zo tijdig worden aangepast waardoor de onderdelen nagenoeg perfect pasten.
Door gebruik te maken van verschillende materialen en het aanpassen van onderdelen, kon alle ruimte op onze perspex-plaat gebruikt worden voor onderdelen met lastige vormen.
Bij het samenvoegen van alle onderdelen bleek er een ruimte-tekort te ontstaan. Hierom zijn bepaalde makkelijk te vervaardigen onderdelen, zoals de armen en de scharnieren aan de muur, vervangen door onderdelen van hout. Tevens zijn de onderste twee vingers aangepast om ruimte te besparen.
Omdat wij veel aandacht hebben besteed aan het ontwerpen en nagenoeg alles overdacht en nagerekend hebben, werkte het grijpmechanisme bij de eerste test al uitstekend; zo kon de grijper met gemak een koffiebeker vastpakken en optillen. Wat in eerste instantie niet zo’n succes was, was het testen van tetrapakken: de grijper had te weinig grijpkracht om deze op te tillen. Door de elastieken tussen de vingers (degene die de vingers naar elkaar toe trekken) strakker te zetten is dit probleem echter verholpen.
